GRAVITY EFFECTED LOAD SWAY VELOCITY AND ACCELERATION DETECTION
AND OPTICAL CLOSED LOOP MOTION AND POSITION CONTROL
Swaytec tehnology backgrounds
New visions
Our capability lift and carry goods is limited as we all very well know. This new approach to closed loop control technology provides us more efficient way to transfer goods with cranes or similiar equipment. Furhermore, closed loop motion control makes machine control more easier and safer. Technology fundament is to use paralell light wawes for locating interested particle. The moment when any light reflects from the surfice of body to be detected is our EVENT. Afterwards we receive this information to our OBSERVER. If we have more than one OBSERVER, all OBSERVERS should measure the same EVENT. The use of light waves lead us to SPECIAL RELATIVITY and our goal to overcome gravity forcies and disturbancies where we have a motion control system with acceleration and deceleration lead us to GENERAL RELATIVITY.
ACCORDING GENERAL RELATIVITY, GRAVITY AND ACCELERATION ARE INSEPARABLE.
Picture 1:Event, two observers and machine vision control system 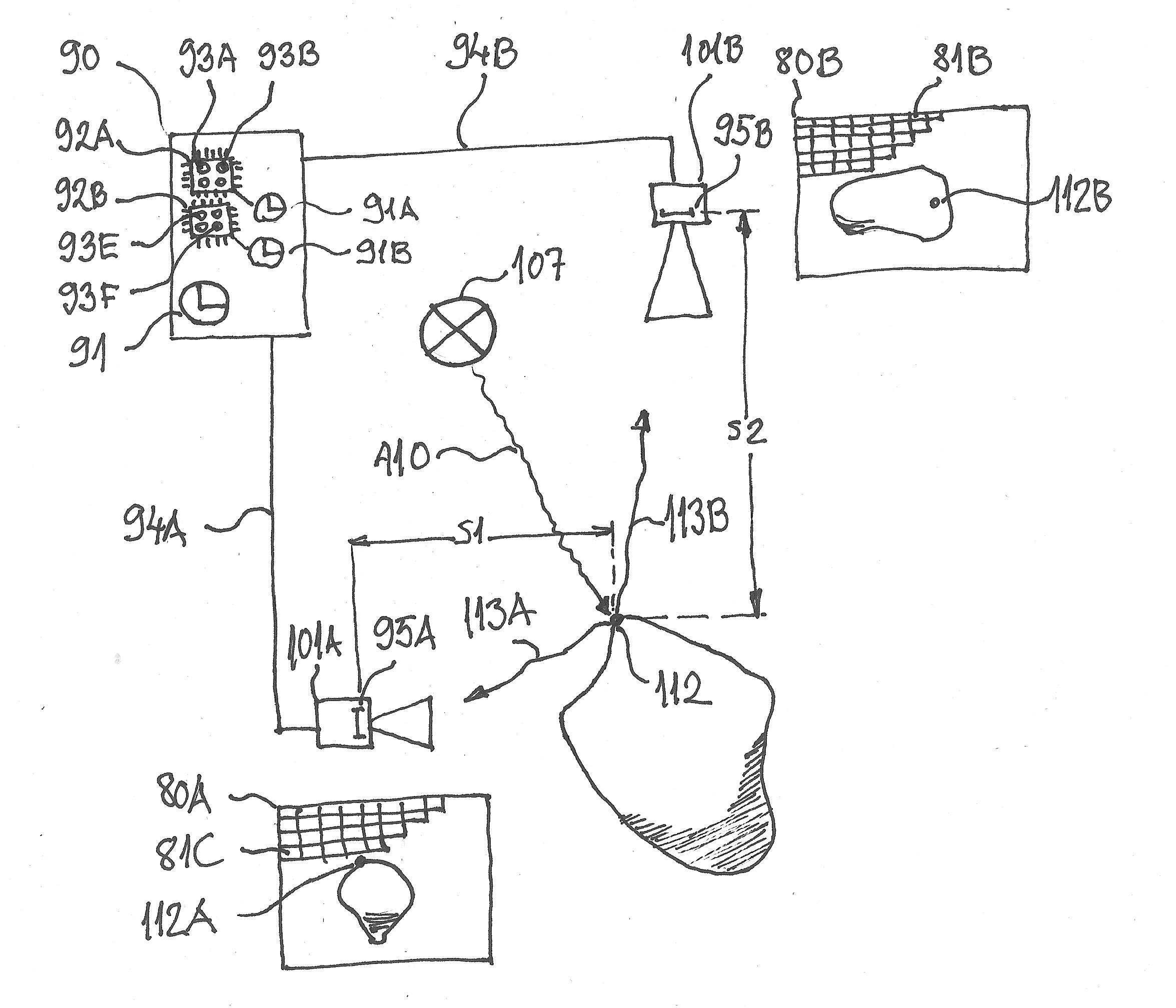
Event (112) and two observers (101A and 102B) 80=light-sensitive cam cell, 81=one pixel, 90=computer, 91=timer , 92=CPU, 93=core, 94=lan, 95=image sensor, 101=observer (camera) , 107=light source, 110=light waves (no information) , 112=light reflecting event, 113=light waves (info about the event) |
Improved closed loop gravity related motion control
What is event? How to control motion with two or more vision systems. The speed of light c=299 792 458 m/s is in the air v=c/1,0003 m/s. Todays computers processors have over 3GHz clock frequency, several cores and multi task enviroment. This makes clock frequency length less than 100 mm with the speed of light c. Computer programs can not use single clock frequency directly but this exchange ratio give us a small hint about those huge numbers. Important is to take one step forward to more accurate close loop motion control. |
Alberts Einstein (1879-1955) publish his special relativity theory 1905 and general relativity theory followed 1915. However, material handling equipment has been designed and dimensioned always according Isaac Newton (1642-1727) (IN) theory of gravity. Newton's theory is accurate enought for machine material mechanics dimensioning. But when we control machines motion, Newton's theory is not enought accurate because it can not actually used for real time measuring of orbits gravity and acceleration forcies. A fact is that gravitional field has the weakest interaction of any physical field. We know that general theory of relativity exposes Newtow's theory to be an approximation.
This project get started from two challenges to be solved:
This first question has arised to us in the beginning 2000 century in our labratory studies:
1. How to prove opinion that optically measured closed loop motion control overcame Newton's theory of gravity?
Why? Newton's theory of gravity can solve interaction between two orbits. Even Newton himself was depressed when he could not sove several bodies interaction.
Todays machinery motion control require more accurate control systems. We know that even bodies like the moon and the sun has a small impact to bodies on earth, they affect to our everyday life by causing our every day physical phonomen like wind and tide. As well machine constructions mechanical changes like material structure bending and oscillation as well as waves for ships require something more than Newton theory of gravity in real time motion control.
In the future every procent that we gain in energy efficiency achieve is a must. Engineers as we has to try find the final truth to those problems we face in our every day work.
|
Gravity and a body motion is affected by space!
Space affects to our work also in many other ways than how Newtons mechanics demonstrates motion. From our point of view, Newtons mechanics is most suitable for machinery dimensioning where we need calculations corresponding constructions to carry maximum loads. Newton mechanics is not correct solution for closed loop motion control where we need short time motion data from the body to be followed. Short time here means less than 100 millisecond and space of motion typically less than 1 meter Wind, tide, construction bending affect to motion transfer and it must be taken in count when gravity is the weakest force in physics. Relativity theories, special and general, offer correct fundaments and basic tools for tomorrows closed loop real time motion control systems. |
Picture 2:Space and gravity 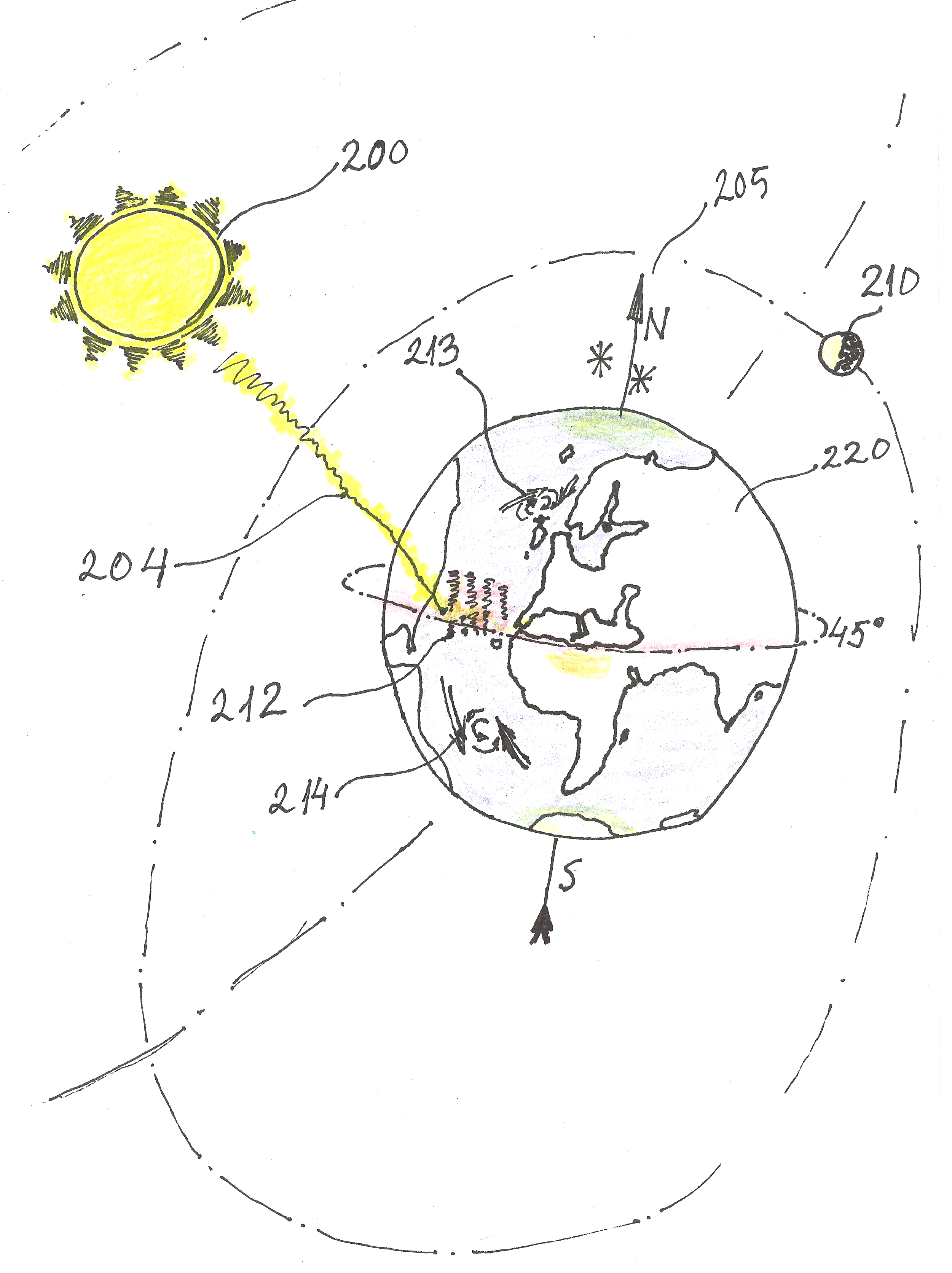
Picture description: 200=The Sun, 204=light and heat energy, 205=The Earth own rotating axle, 210=The Moon, 212=warm air heats the sea, 213=wind rotationg CW, 214=wind rotationg CCW, 220=The Earth |
Second question was how to receive from distant body surfice reflected light waves with two observers locating different distancies:
2. How to solve X/Y/Z-multi axis positioning with two or more cameras? What means simultanious?
This question could have been solved basicly using normal engineering skills. At this point Finnish broadcasting company YLEISRADIO sent Tuesday 28.6.2011 5.20pm an 'Radiaattori' broadcast program about Albert Einstein . In the program professor Jukka Maalampi explained clearly Einsteins foundings to Sisko Loikkanen 'Einstein used his brain shells and found his amasing theories of relativity'. Pieces fall in to their places.
Simultanious, how different observers see the same moment, has a great importency for future motion control like for material handling. Gravity and motion are in all time in interaction between each others. Motion, acceleration and deceleration are inseparable from gravity. How James Clerk Maxwell (1831-1879) four clauses declare the elecmagnetic waves and only with them we can justify what means simultaneous to different observers. More over, gravity is property of space.
Picture 3:Pisa Cathetral 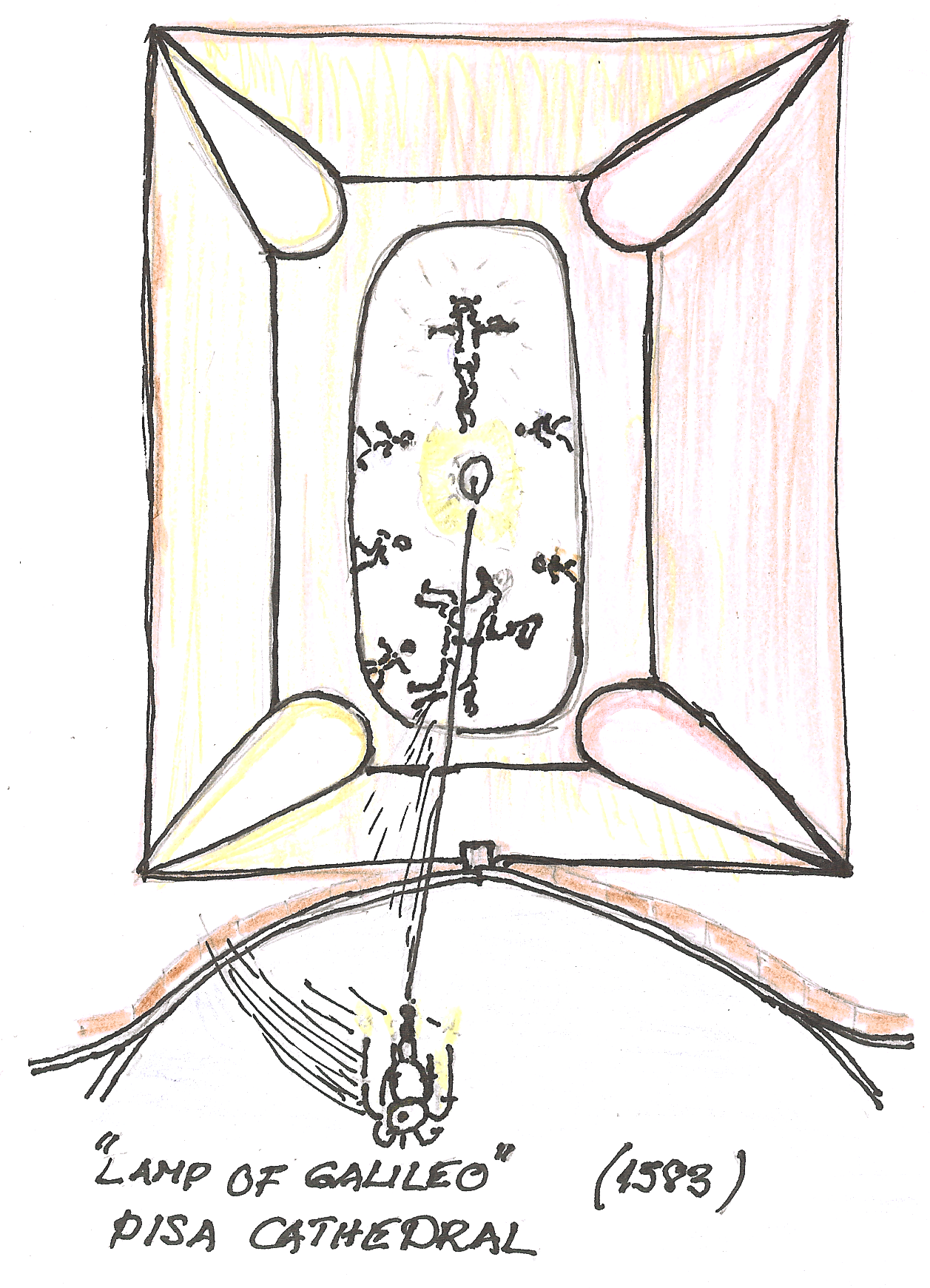 |
Galileo Galilei
As a 19 years old student of University Pisa, Galileo solve sway motion (1583) at Pisa cathetral by studying one of its dome lamp sway. 1589 he cecome a professor of mathematics at university of Padua. He writes works On Motion (1589) and Mechanics (1594) for his students. Books were not published. Galileos work with mechanics and motion has still today a important role. |
Light and optical lenses have a long history and huge importance to our physichs and conception of the world.
Optical measurement has a great importance to our way of understanding of universe. Before Galileo Galilei Copernician universe was know but not commonly accepted. It was missing the scientific evidencies and Catholic church acceptance.
In the late year 1609 and beginning of 1610, Galileo Galileo made his firts 'eye glass'.
|
Galilei focused his telescope to Jupiter in January the 7. in 1610. He started to put down Jupiter's four moons rotation around Jupiter. He published his findings in his book Sidereus Nuncius (1610). He said that his thelescope magnifation would be about x30 but from thelesscopes left to our days , magnitude would be like in our cameras about x20. The Galileis measurements of Jupiter moons prove that the universe is not rotating arournd the earth as it was told to be. |
Picture 4:Perspicillum 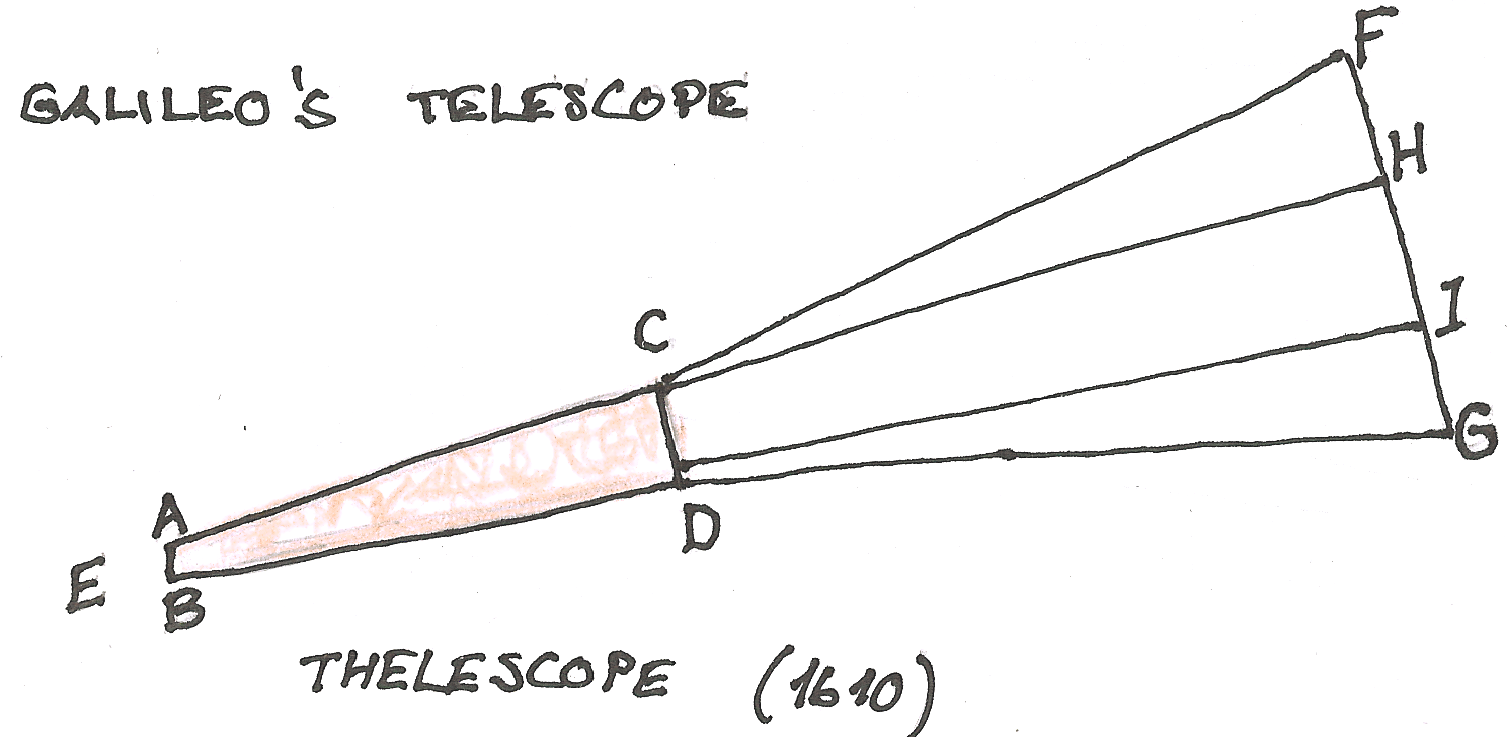
|
Picture 5:Revolution 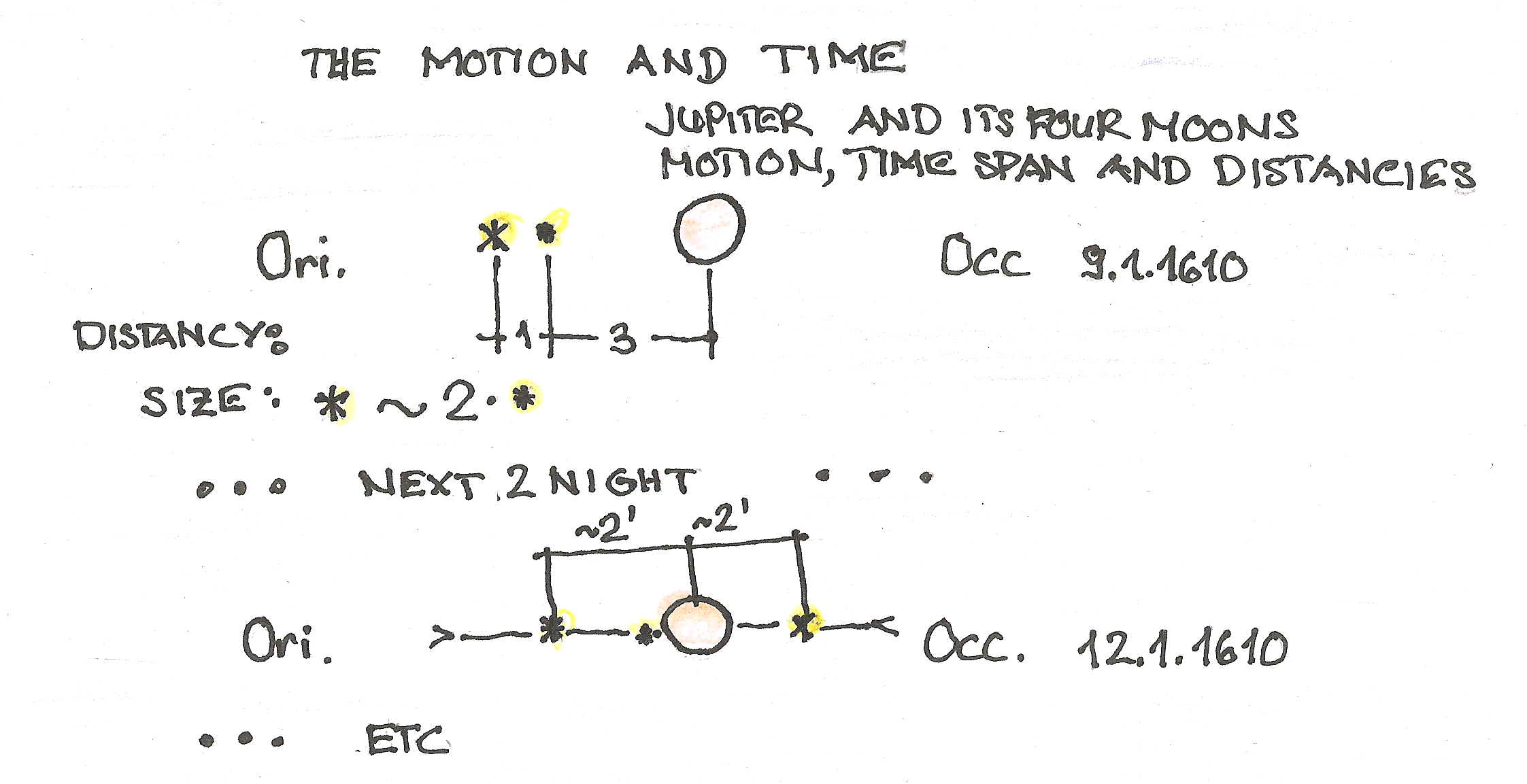 |
Galileo Galilei: Jupiter and its four moons 1954 Galilei became interested of astronomy. German Johannes Kepler (1571-1630) sent him his book Mysterium Cosmographicum. Book included the idea that the sun is the center of universe. Same opinion had earlier also Nicolas Copernicus (473-1543) who publish his opinioin from his deathbed 1543 because he was afraid of catholic curch inquisition. Finally Jupiters moons proved Copernician universe to be correct model. However, Galileo was not allowed to hold nor defend Copernician ideas. 22. June 1633 Galilei led to the great hall of Inquisition. He was humiliated and sentenced to home arrest in the age of 70 years. All his works, even not published books were to be banned. |
When Galileo had measured Jupiter moons positions and our moon size, surfice and land profiles, he actually had invented the science of optic measure.
|
Measure distant heights
Moon great circle is CAF, Center E, and diameter CF which is equal to 2/7-part to earths diameter. Galilei measured moon mounting heights by detecting mountins peak visibility on the moons dark shadow side. Some of peaks were visible even with a distance of 1/20 of moons diameter (CF). Measured peak hights several times with Moons different angles to the Sun, Galilei could estimate Moon peak heights. This ment that, when Earth diameter was 7000 Italian (Roman) mile (1478 meters), CF is 2000, CF 1000 and 1/20 of CF is height of 100 miles. These kind of optical measurements that Galilei did and documented in Sidereus Nuncius, were the first steps in optical measure technology. |
Picture 6:Mountain height 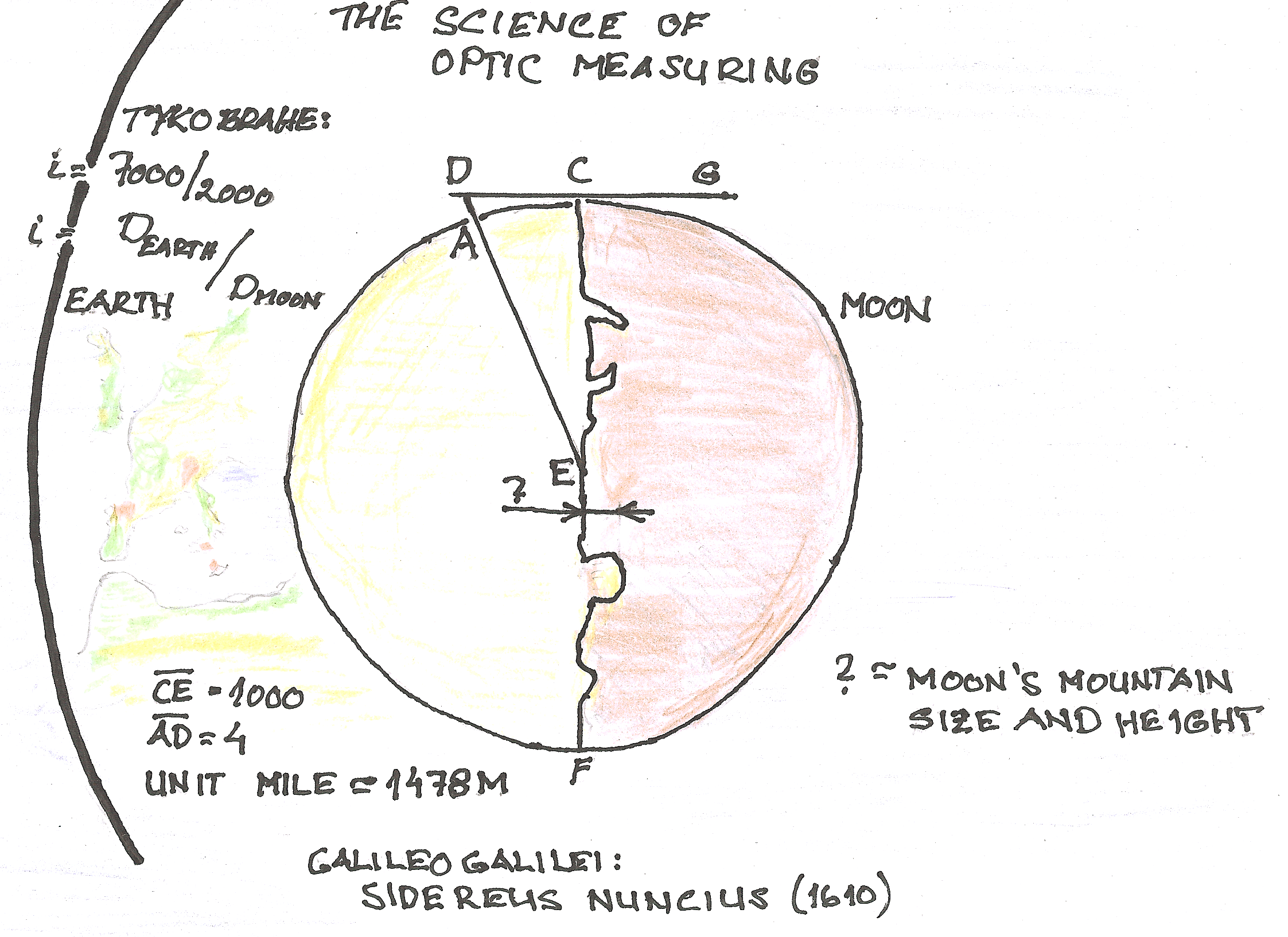 |
Picture 7:Space 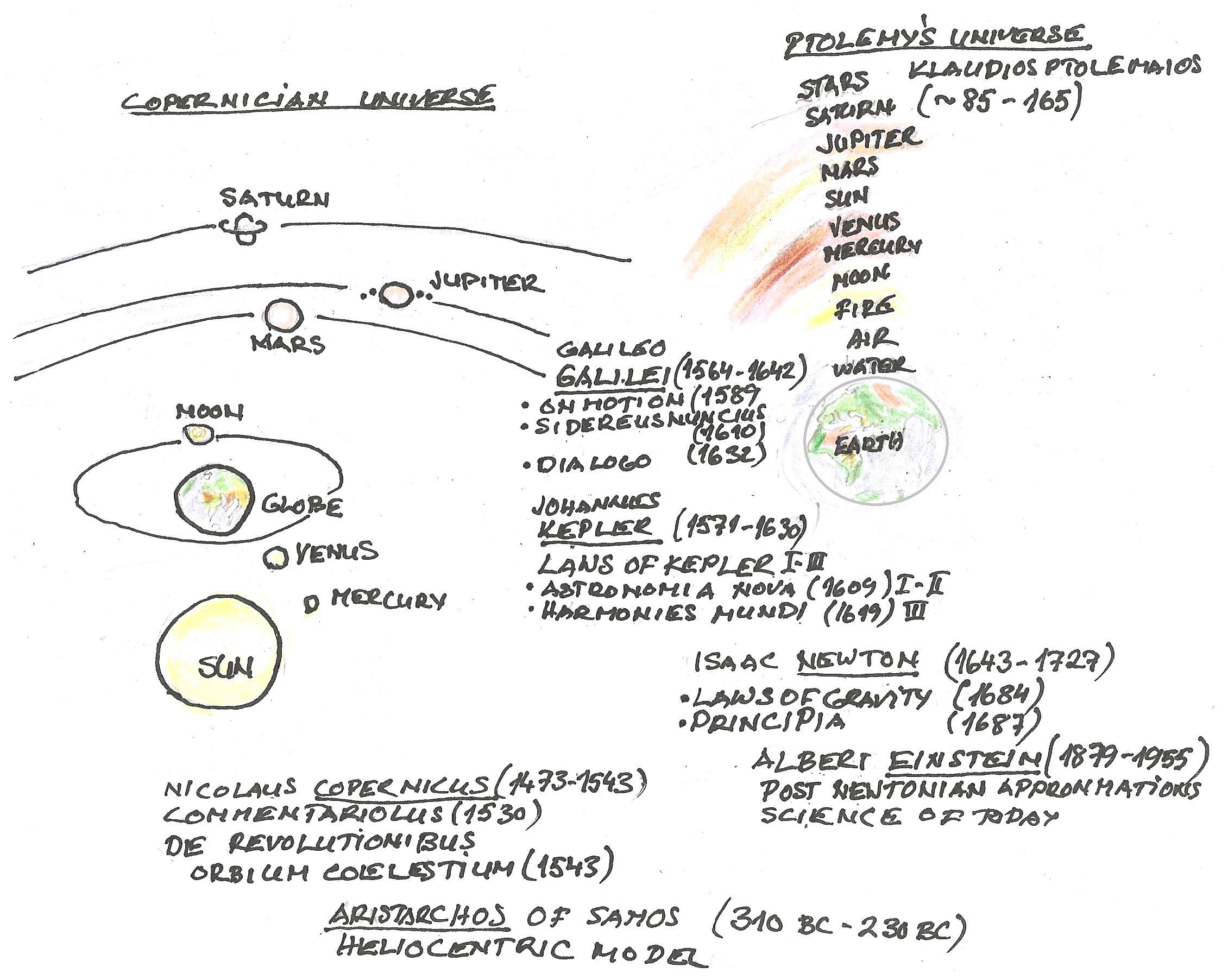
|
Developmet of Universe: From Ptolemaios to Galilei
Optic observation enabled Galilei to discover that Copernician universe is correct compared to old Ptolemaios universe which was at his time kept as the truth. Copernicus publish his 'Orbium Coelestium' 1543 from his deathbed to avoid expected catolic church invisition. |
|
Moon flight Apollo 15 (1971)
On the moon a feather and a hammer fall with a same speed. On the Apollo 15 flight to the Moon in 1971 Commander Scott tested this. |
Picture 8:Apollo 15 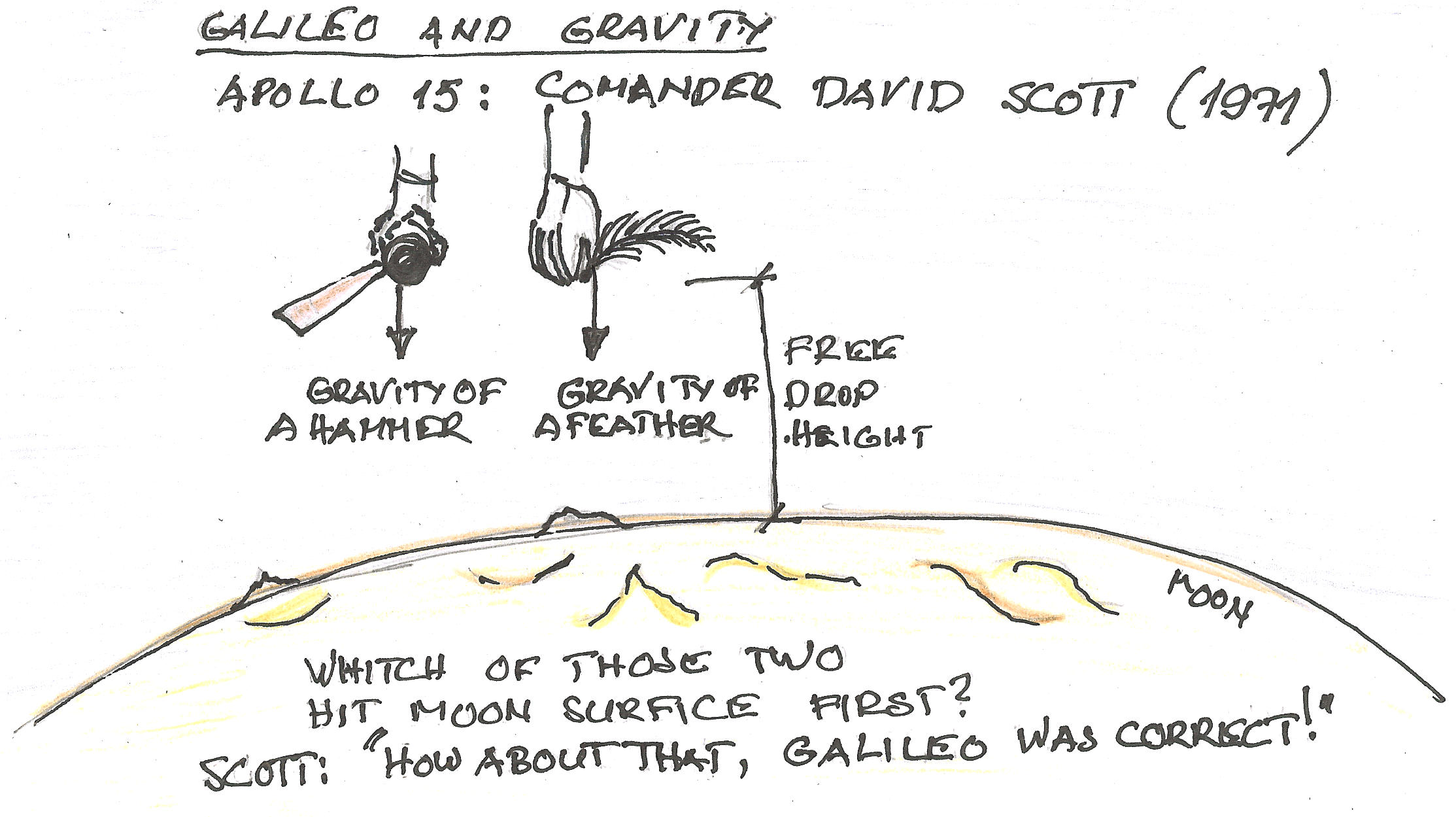
Galileos insfluence can be flet also today! |
NEWTONS PHYSICS
The big question is whether Newton's physics would be accurate enought for closed loop motion technology.
Isaac Newtons Principia include of three books.
In definitions part of his book, Newton introducies his three laws of motion.
"The alteration of motion is ever proportional yo the motive force imressed; and is made in direction of right line in which that force is impressed." [4]
"The alteration of motion is ever proportional to the motive force impressed; and is made in the direction of the right line in which that force is impressed. [4]
"To every action there is always opposed an equal reaction: or the mutual actions of two bodies upon each other are always equal, and directed to contrary parts." [4]
In laws preseeding explanatory note (Scholium) Newton state two definitions:
Absolut, true, and mathematical time, of itself, and from its own nature flows equably without regard to anything external, and by another name called duration: relative, apparent, and common time, is some sensible and external (whether accurate or unequale) measure of duration by the means of motion, which is commonly used instead of true time; such as an hour, a day, a month, a year.
Picture 9:Pendelum clock 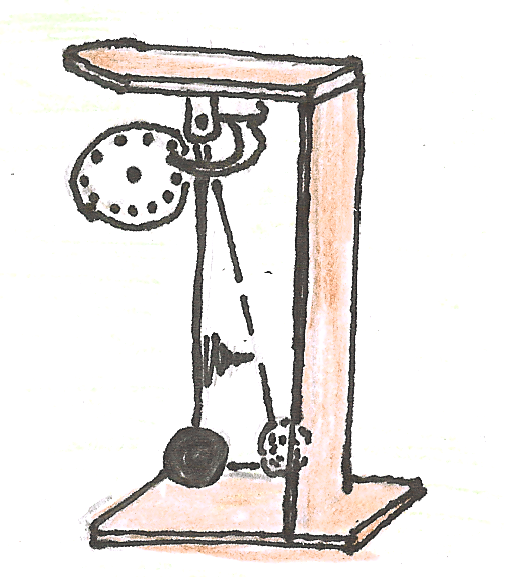
|
Pendelum clock
Even Galileos clock designs where excelent altought he did never fully succeed to finalize his thoughts to reality. Later his son continue his stud ies with clocks. |
What is interesting in Pricipia, Newton introduce his theory by using pure geometry. Anti-sway vision tecnnology follow Newtons way to calculate motion more than differential or integral calculatios. Our system measure portions of visual tarkets and calculate times, distancies and directions. We can forecast coming events where we meet other bodies by using position or by events expected atributes.
However, the biggest diffrence is, that Principia is a theory for two bodies and it is based on absolute time and space. While using closed loop control, our local space and time is realtive, typically we mean with local space area what we see within in few milliseconds time. Our local space belong to global space where all bodies interact to each other every moment. We see Galileos local gravitation acceleration constant 'g' is an estimation and on our Earth this value is [5]:
For best possible motion control use of 'g' is not enougth accurate for us neither in energy efficiency perpective nor control accuracy and safety perpective.
|
Newtons motion formulas Newton's theory of gravity is a good method to calculate interaction between two bodies. However it does not suit good for short time motion control where other forces than weak gravity may cause more disturtabcies to the motion. Even several bodies interaction can calculated but calculation of from each other distant bodies do not solve the short term motion control. Special relativity with it's James Maxwell's theory of electromagnetic fields and Einsteins General relativity combines gravity and acceleration in a way that is suitable for closed loop motion control. Gravitional constant g is 'only' an estimation and therefore it can not provide such motion control accuracy and actually no position at all. From a body surfice to be followed reflecting paralell light waves carry extreamly accurate information with the highest possible speed, with a speed of light. |
Picture 10:Newton and gravity in sway motion 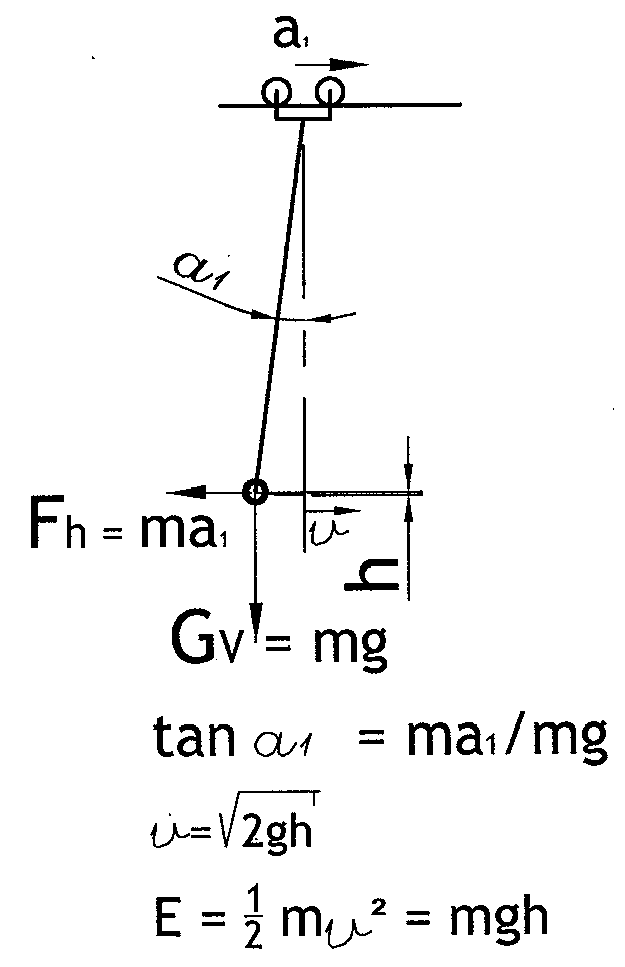
Sway motion speed (v) and Newtons motion formulas F=Force [N], m=mass [kg], g=acceleration due to gravity, a=acceleration [m/s^2], h=sway vertical height [m], Gv=Gravity force [N], alfa=angle, v=sway speed [m/s^2],E=Sway energy [J] |
It introduces in clause 'F=mg' only bodys weight without taking in count motion and other effecting forcies. Those other forcies may be calculated if we would have measuring system for all other forcies but we do not have such. Optical, contact free motion control can measure distant body place to observer with body effecting all forcies. Two measurements and time interval give us speed and with third measurement we get acceleration. Optical measurements include all effecting forcies of surrounding space!
The smaller time resolution we achieve for our optical measurements while detecting badies motion, the better and accurate motion control we achieve.
From our point of view, we consider Newtons physics suitable for machine mechanics. But for optical motion detect and control there of, we need more accurate local physics than Newtons and Galileos.
What we consider suitable is electromagetic fields, speed of light and system where acceleration and gravity are inseparable.
ALBERT EINSTEIN:
THE SPECIAL AND GENERAL THEORY[17]We started to search an answer for simultaneity and for use special relavity in advance for motion control. We selected two trains and how those with high speed travelling trains meet each others on fly. The main thing is that even with travelling with very high speed, light waves reflecting from remote body, arrive to observer with a speed of light. Optical positioning is adjustable with optics.
Picture 11:Trains approaching 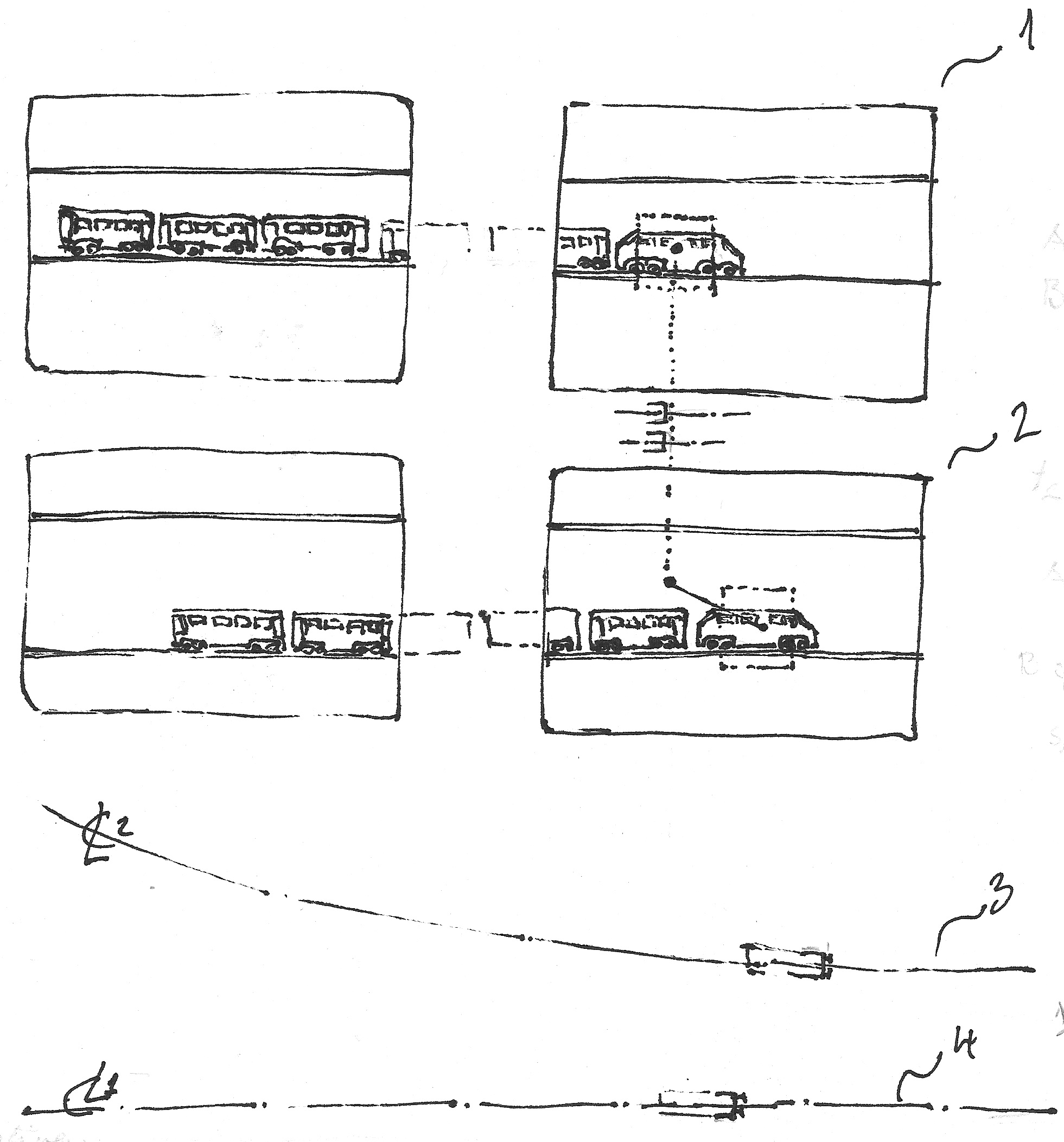
Two trains get near each orthers |
Trains approaching
The speed of light is equal to all observers when time and distance is relative. In the firts image (1) we teach and region of interest (ROI) from our train. ROI Teaching can be also automated by using time table and train position. However, automated ROI teaching require one time done pre-teaching of ROI train. In the Picture 1 the pin needle marker and pin are the same. Soon remote train get ahead and it goes lower. Because of fast speed, no other detecting methods work because trains do not have any physical connection. Because train wheel run so fast, with speed of light we can produce control value to detect ROI and get easily correct reference value to adjust our trains speed. If both trains would have optic ROI measurement and speed control system, meeting would be even more efficient. |
|
Optical repositioning is flexible In the picture 5 we reteach ROI pointing to door area after locomotive. Rails 7,8 are paralell but remote train stay behing. We shoud lower our speed. |
Picture 12:Trains near each others 
Trains meeting point get near |
Picture 13:Mailbag exchange 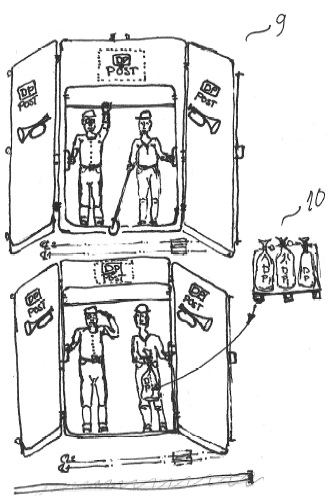
Meeting point |
We do not need to stop motion
In the picture 5 we reteach ROI pointing to door area after locomotive. Rails 7,8 are paralell but remote train stay behing. We shoud lower our speed. |
If those two trains would be controlled only by local wheel rotation speed encoders, imagine the the impulse frequency with very high speeds. Furhermore, remote, contact free motion measurement up speed of light. It will take time to improve control system cyclic speed but every day will improve system usability.
Remote body position system is usable from NANO to MACRO LEVEL.